

ApplicationsDecember 4, 2020
PC and EtherCAT-based control for Magellan telescope
Giant Magellan Telescope (GMT) combines site-wide, real-time connectivity with 3,000 precisely controlled servo axes. The telescope design boasts a resolution 10 times greater than that afforded by the Hubble Space Telescope, and moved away from building the automation solution using custom control components.
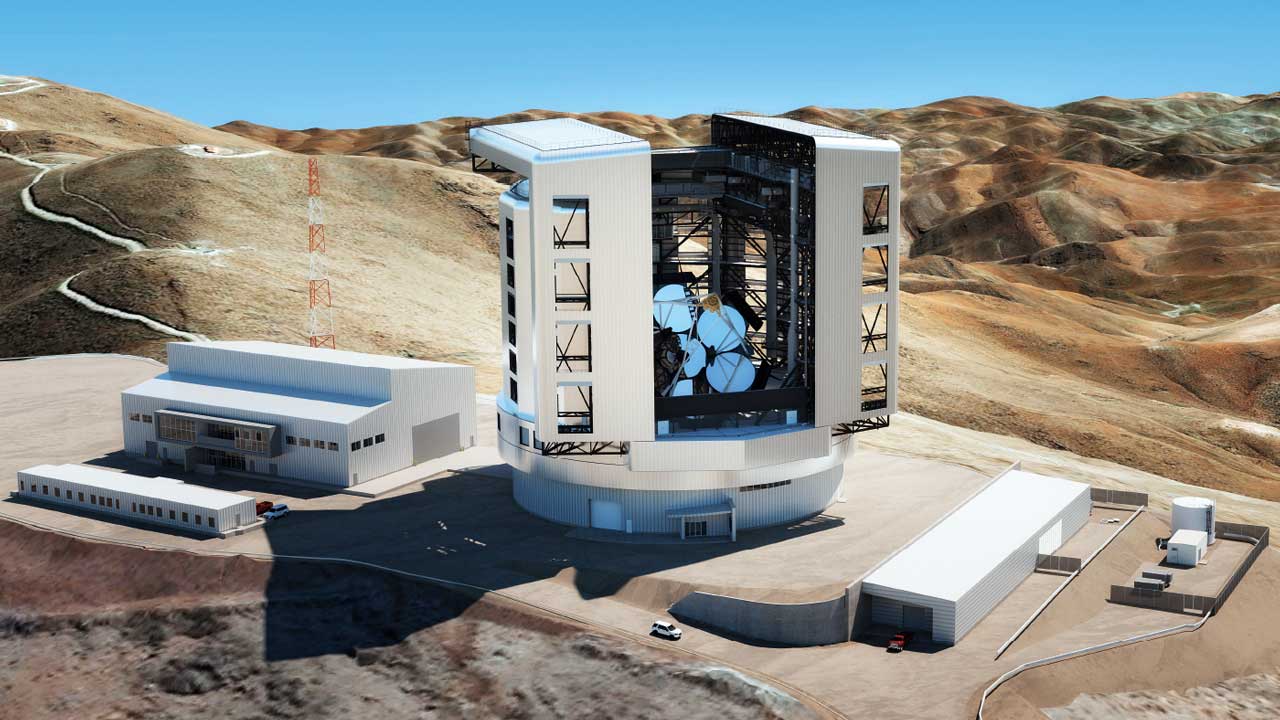
The Giant Magellan Telescope (GMT) is expected to go live in 2029, after the next-generation telescope completes its long construction and planning period. With seven mirrors and a combined diameter of 25 m, the telescope will enable entirely new resolutions and even allow a look back into the time after the Big Bang.
PC-based control was specified as the future automation equipment. Key factors were the advantages of EtherCAT for site-wide, real-time communication connecting all telescope functions. Various Embedded PCs and AM8000 servomotors were also tested and specified, among other things, to move more than 3,000 motion axes.
Once installed at Las Campanas Observatory, the Giant Magellan Telescope will introduce incredible opportunities for the astrophysics and cosmology research communities. The land-based telescope design boasts a resolution 10 times greater than that afforded by the Hubble Space Telescope by combining seven mirrors into a singular optical system with a total diameter of 25 m.
These advances will enable the GMT to capture images of astronomical objects sharper than currently possible by reducing distortions introduced by the terrestrial atmosphere using adaptive optics systems. Scientists and engineers working on similar telescope projects have traditionally built their own automation solutions using custom control components.
However, the team that is currently planning the infrastructure for the GMT sees this differently, explained GMTO Senior Electronics Engineer José Soto: “We want to change the historical method of treating telescopes as special and totally unlike other automated systems. Future-facing industrial control solutions have the power to solve many problems we face today in astrophysics.”
Standards-based automation
Specifying automation and controls components for the GMT also required careful consideration due to the real-time communication and control requirements, especially considering the system will possess more than 3,000 axes of motion. Beyond rotating the telescope’s 22-story-tall enclosure, the flexible mirrors must move with utmost precision to implement the complex adaptive optics in order to achieve the highest possible image resolution.
One example is the active optics system, which requires integration of 170 pneumatic actuators per primary mirror to support the mass of each mirror.
The engineering team identified the need for automation and controls components that were powerful now, but would also support future advances in technology, explains José Soto: “Since these projects take a long time we must account for obsolescence in every aspect. The most effective method of fighting obsolescence is standardizing on proven industrial technologies.” These factors led GMTO to base specifications for the control system using industrial standards.
When GMTO engineers began exploring industrial automation and controls, they examined multiple industrial Ethernet networks. They found EtherCAT provided a flexible topology and scalability, along with the ability to incorporate up to 65,535 EtherCAT devices in one network, which matched the system specification of the GMT. “EtherCAT will be embedded in nearly every GMT telescope system — from the primary mirrors to the atmospheric dispersion compensator, the enclosure, mount and even the building automation in the facilities,” Soto said.
According to GMTO Engineer Hector Swett, Safety over EtherCAT (FSoE) also offered impressive functionality for the telescope’s interlock and safety systems. FSoE provides GMT with safety-rated, TÜV-certified communication over standard EtherCAT networks, numerous options for distributed TwinSAFE I/O modules and integration with the Beckhoff engineering environment and Industrial PCs.

Certain current GMT specifications recommend multiple PC-based controllers that could be fulfilled by Beckhoff solutions. The interlock and safety system relies on many safety controllers, DIN-rail-mounted CX9020 Embedded PCs working in conjunction with EL6910 TwinSAFE Logic I/O modules. These interface with each other through FSoE via EtherCAT Automation Profile (EAP) to implement safety functions as required by the hazard analysis, Swett says. Beckhoff CX2020 Embedded PCs are used in the GMT Hardware Development Kit, which was built for the project’s partners to develop instruments for the telescope.
TwinCAT 3 automation software from Beckhoff has offered a key platform to test devices, and it is specified for control of the structures around the telescope. “The PC-based controller for the telescope’s enclosure will run TwinCAT directly,” Swett said. “It also provides the real-time capability to interface this massive application with the observatory control system via OPC UA.”
Exemplifying system openness, TwinCAT can automatically scan and configure third-party devices over ADS and EtherCAT, providing an optimal platform for all tasks from sensing to motion control.
Because the telescope will have thousands of axes of motion, dependable motors and drives will be crucial in the final configuration. José Soto finds the capabilities of Beckhoff AM8000 servomotors impressive and sees them as a serious contender for multiple areas throughout the telescope.
“When our integrator teams begin to commission the telescope, they will very likely use AM8000 Servomotors, for example, in the atmospheric dispersion compensator or the GIR (Gregorian Instrument Rotator) that will move all instruments attached to the Cassegrain focus,” Soto said.
New technologies for creative ideas

EtherCAT first led the GMTO engineers to Beckhoff, and it remains foundational to the telescope’s control architecture design, José Soto explained: “Using EtherCAT as the GMT fieldbus enables real-time communication down to the I/O-level. We have achieved cycle times of 2 ms, which allows enough bandwidth to close the loop on a range of subsystems, expanding our control and networking abilities significantly.”
Compact EtherCAT I/O modules and Embedded PCs save space in control cabinets, and because the PC-based controllers can be located at a distance from the I/Os, this reduces heat dissipation.
“Reducing heat is a very big deal for the GMT,” Hector Swett added. “Heat makes the air more turbulent inside the enclosure, and turbulence distorts images as the light travels through the air. This distributed I/O architecture helps us prevent that.”
In a decade, this process of observation and discovery will not belong to the engineers designing and building the GMT, but to the astrophysicists and cosmologists using it to explore the cosmos.
Researchers will have the flexibility to bring their own creative ideas when using the telescope to make great discoveries that cannot yet even be imagined.
The Giant Magellan Telescope
The Giant Magellan Telescope project is an international consortium of 12 founding institutions. These include Arizona State University, Astronomy Australia Limited, Australian National University, Carnegie Institution for Science, FAPESP (São Paulo Research Foundation), Harvard University, Korea Astronomy and Space Science Institute, Smithsonian Institution, Texas A&M University, The University of Texas at Austin, University of Arizona and University of Chicago.
By supplying funding for the construction and operation of the telescope, these organizations will receive access for their researchers to use the Giant Magellan Telescope after a peer review process to prioritize projects.
James Figy, Senior Content Specialist, Beckhoff Automation USA.