

TechnologyJuly 20, 2023
20 years of compatible, open EtherCAT communications
IEB presents an interview with Hans Beckhoff, Johannes Beckhoff and Martin Rostan of Beckhoff looking back on 20 years of EtherCAT.
It has now been over 20 years since the EtherCAT story first began, and it is still just as successful as ever.
Indeed, the communication system developed by Beckhoff and presented for the first time at Hannover Messe 2003 has certainly been established as a high-performance real-time Ethernet solution in a wide range of applications, firmly establishing its place on the market through continuity and technical development, and even becoming an open IEC standard.
Here, Hans Beckhoff and Martin Rostan describe the stand-out aspects of this exciting period in the company’s history, while Johannes Beckhoff represents the next generation of management by focusing on requirements for the future.

It was back in 1989 that Beckhoff first introduced its high-performance bus system known as Lightbus. What were the reasons for developing a new communication system with EtherCAT?
20 Years of EtherCAT communications.
Hans Beckhoff: Beckhoff has always been renowned for high-performance control and the way we continually push performance limits in the world of automation. This is all based on the principle of PC-based control technology, which allows us to exploit all the advantages of a PC – most notably including the high computing power – directly on the machine. In terms of data communication, we came up with an excellent solution in 1989 in the form of the Lightbus.
By the early 2000s, PCs had Ethernet interfaces as standard, and the first processors with integrated Ethernet interfaces were hitting the market. EtherCAT was developed so we would be able to use this new information technology medium on the machine, in line with our philosophy of connecting the IT world with automation. Our extensive experience with not just the Lightbus, but also all other fieldbuses such as CANopen and PROFIBUS, has been incorporated into the concept. This has certainly contributed to the overwhelming success of EtherCAT.
Martin Rostan: Our starting point was the fact that Lightbus – and indeed the other fieldbuses and first Industrial Ethernet technologies – could no longer keep up with the performance increase of the PCs. At the time, this resulted in highly complicated control architectures, as they were all decentralized. PC-based control, on the other hand, relies primarily on a centralized control approach and requires a correspondingly high-performance communication technology. EtherCAT bridged this gap and, in doing so, eliminated the former bottleneck in data communication – something it continues to do today some 20 years later.
Hans Beckhoff: That’s right – with Ethernet and the 100 Mbit/s data rate that comes with it, control technology could benefit from a tenfold increase in transmission speed. The RS485 and CAN-based networks of the time worked well, but they were limited in terms of bandwidth and performance.
Which Ethernet aspects were particularly important when it came to implementing this technology on an industrial scale?
Hans Beckhoff: The Ethernet protocol is designed for the transmission of large amounts of data and long data telegrams, not for the small units of information common in the machine environment, such as a 1-bit limit switch value or a 16-bit analog value. With that in mind, the task was to find a synthesis between the 100 Mbit/s data rate and the fine 1 to 16 bit range found in the automation environment – and that is precisely the ideal solution we were able to achieve with EtherCAT. Not only did we completely reinvent the technical principles necessary for this, but we also integrated them into both the EtherCAT protocol and the EtherCAT hardware.
Martin Rostan: We took the basic principle of telegram processing on the fly from the Lightbus and elevated data communication to a whole new level. We also made constructive use of the new Ethernet technology, which had since arrived in the domain of automation technology, to elegantly circumvent the major bottleneck with Ethernet for real-time communication. A major contributing factor here was the high level of protocol efficiency – i.e., utilizing more than 90% of the available bandwidth. It was also significant that the complexity of the protocol was completely mapped in the hardware, as this simplified the entire EtherCAT implementation process considerably for the device manufacturers.

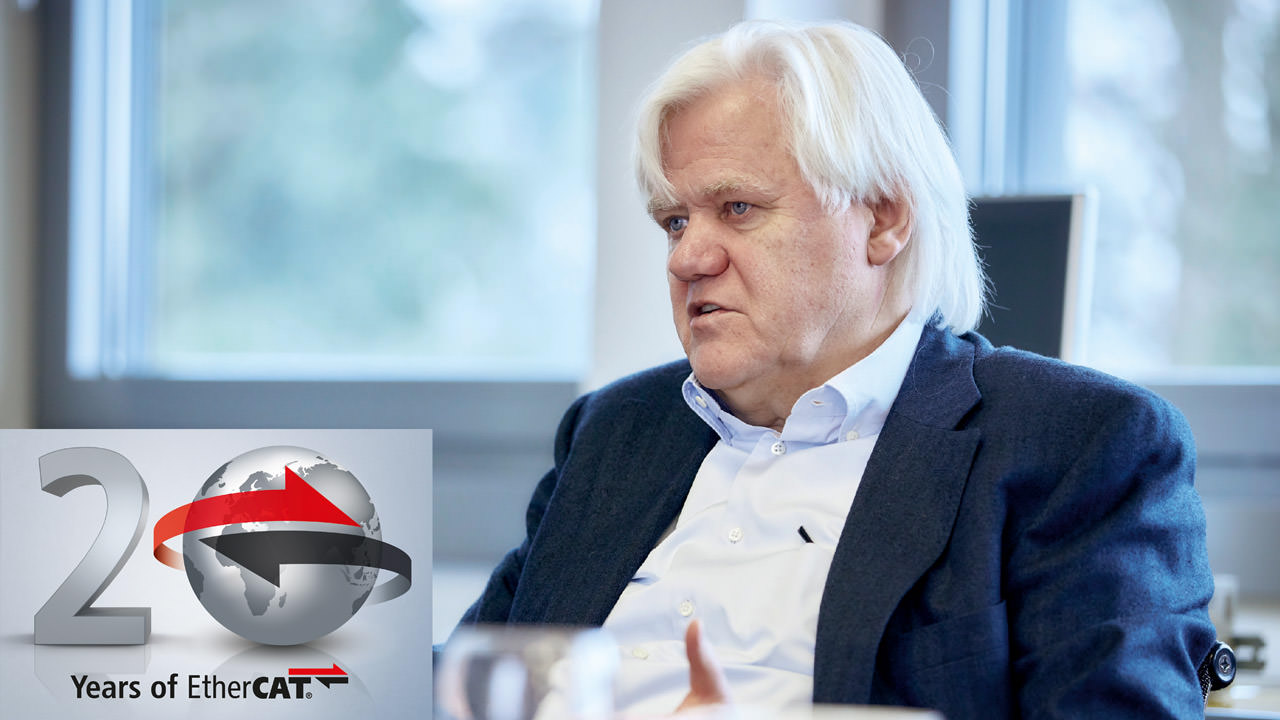
Hans Beckhoff (center) and Martin Rostan (left) review the past 20 successful EtherCAT years and share their many years of experience with the next generation represented by Johannes Beckhoff (right).
How would you summarize the fundamental advantages of EtherCAT?
Hans Beckhoff: First of all, the traditional RS485 and CAN-based fieldbuses are what are known as party-line buses, which feature multiple devices on a single connection. Network diagnostics and troubleshooting are significantly more complicated as a result. This is why EtherCAT has adopted the point-to-point connection of Ethernet so that each transmission path can be properly diagnosed, which is an essential feature. We also decided quite early on that we could manage with a standard Ethernet telegram and so do without a special communication card in the master, which is still a major advantage of EtherCAT. The key advantage, though, is the protocol efficiency that we have already discussed – i.e., the fact that data can be taken from or added to the 64- to 1,500-byte Ethernet telegram on the fly. This is the only way to ensure that the high bandwidth can be used consistently and for the many small information units of the numerous automation devices, with over 65,000 of these possible in the same network, in a single telegram.
Martin Rostan: This principle results in yet another advantage, in that the controller can already compile the process image perfectly in the data telegram, since the network nodes can insert or remove their data at any point. This eliminates the need for the bit operations required in other systems, which are complex to implement via an interface card. The EtherCAT master, on the other hand, does not impact the controller in any way, as a completely pre-sorted process image is available that can be processed directly. EtherCAT is therefore not only very fast in terms of actual communication with very short cycle times, but also in all upstream and downstream process steps.
Hans Beckhoff: That’s right. And this principle is based on the IT function of the Memory Management Unit, which we have further developed into the Fieldbus Memory Management Unit (FMMU) for this purpose. The FMMU is one of the essential features of EtherCAT and allows data to be taken from and written back to a decentralized memory on the fly, so that any kind of mapping can take place between the data in the physical device and the data in the active telegram.
What’s more, individual tasks and processor cores can also be mapped very well via the FMMU and defined with corresponding time levels, which ideally corresponds to modern and task-based control technology. Another central feature of EtherCAT can be found in the distributed clocks, which introduced a defined and automatically synchronized system time for the communication system. This is crucial since advanced control concepts are almost always time-slice based and require synchronized sampling points for data and signals. This entire concept of distributed clocks simply did not exist in previous fieldbuses.
Are these fundamental EtherCAT advantages also perceived in this way on the market?
Hans Beckhoff: Absolutely. All of these advantages add up to a technology that is inherently logical and quickly understood and loved by engineers worldwide. This rather emotional aspect is certainly also one of the reasons why EtherCAT has become so firmly established worldwide.
Johannes Beckhoff: I can only agree with that, despite not having been involved in this early development myself. By its very nature, EtherCAT is a high-performance and at the same time simple and logical protocol. Without even looking at the other systems, I asked myself right from the outset: What else would we use for Industrial Ethernet when EtherCAT is clearly the optimal solution?
Martin Rostan: Yes, back then, we even coined the phrase “EtherCAT is the engineer’s choice”! And that sums it up well: EtherCAT was – and still is – the more convincing technology in comparison and so it is easy to justify its use in technological terms.
How important was the EtherCAT presentation at Hannover Messe 2003 for Beckhoff and how did the market react?
Hans Beckhoff: This was definitely a special event for the development team, with a core group of six experts, and everyone was proud of it. We had a huge presentation wall spanning 4 meters across at the event to really showcase the principle to maximum effect, and we even used oscilloscopes to demonstrate the real-time capability. Everything was incredibly well presented from start to finish, and customers were as enthusiastic as we had hoped. Even the representatives of the other fieldbus organizations and control suppliers were obviously impressed – at least that’s what I gathered from the stunned silence and a few pale faces at the time!
Martin Rostan: That’s right, I can still remember a competitor leaving our booth without even saying hello, with his mouth open and all the colour drained from his face. That was all the confirmation we needed. Everyone who understood how it all worked was immediately enthusiastic about it and confirmed that EtherCAT is the best way to use Industrial Ethernet.
A major contributing factor to the success of EtherCAT was the disclosure of the protocol and the associated foundation of EtherCAT Technology Group (ETG) at the SPS 2003 exhibition. What prompted Beckhoff to choose this moment to open up to the market?
Hans Beckhoff: Without a doubt, the founding of ETG has contributed just as much to our success as the sophisticated technology. ETG was built up by Martin and is now an independent organization that has put EtherCAT technology on the map worldwide. Without ETG, EtherCAT would probably have remained an exciting technology with a few followers, but would never have achieved its current widespread acclaim as a globally accepted standard.
Martin Rostan: Beckhoff has always stood for openness and supported all relevant open fieldbus technologies. At that time, there were around 20 different communication systems and industry-specific variants for which Beckhoff had all the relevant experts. This experience has been channeled into ETG not only technologically, but also in terms of the advantages and disadvantages of the respective user organizations. Once again, this includes the aspect of openness, in that ETG members very much appreciate how the development of EtherCAT technology is managed: Beckhoff is the technology driver, but the requirements of all partners are consistently taken into account.
The principle of open fieldbus organization has clearly proven itself here. It is not without reason that ETG has now become by far the largest fieldbus organization, with more than 7,000 members from 72 countries, worldwide distribution, and Asian members accounting for over 40%. We have grown to the point that the “mere 14%” of our membership from the Americas makes us the largest American fieldbus association. It is also important in terms of the usability of EtherCAT that both device manufacturers and end users were involved from the beginning.
EtherCAT is celebrating its 20th anniversary, but it is by no means a thing of the past. Why is it still the number-one industrial communication system even today?
Hans Beckhoff: Over the last 20 years, the technology has proven to be so well conceived that we have not had to make any changes to the basic protocol. This is a fundamental aspect of our success. What’s more, we have applied the EtherCAT principles to other application levels, such as the EtherCAT Automation Protocol (EAP) for control-to-control communication. We have even introduced the EtherCAT G extension as both a 1 Gbit/s and 10 Gbit/s variant, meaning the EtherCAT protocol also works at these rapidly increasing speeds.
Martin Rostan: It is actually one of the unique selling points of EtherCAT that the technology itself has never had to be changed. The basic protocol contained in the chip has always remained the same and has only ever been extended in a fully backward compatible way. The same applies to Safety over EtherCAT, where backward compatibility is also ensured throughout. Even 100 Mbit/s devices can still be integrated and operated in EtherCAT G networks. What this all means is that a current EtherCAT device will still work in a 20-year-old plant, which in itself is reason enough for many users to choose this fieldbus option, and means our technology will not create a bottleneck in the control architecture in the future. For most applications, this will continue to be the case with 100 Mbit/s; however, EtherCAT G offers sufficient potential to meet all the high-end requirements of the next 20 years without any problems and without a break in technology.
Johannes Beckhoff: I have to agree with Martin here: 100 Mbit/s is sufficient to handle most machine requirements – even for cycle times smaller than 1 ms. EtherCAT G can then be used to implement extremely data-intensive applications, such as XPlanar or Vision applications, with several kbytes of data in a sub-ms cycle. Without EtherCAT G, we would be limited to a maximum of maybe 20 tiles, so we wouldn’t be able to develop a really large XPlanar system. A Gbit/s data rate already enables over 100 tiles.
This generally also applies to the XTS linear transport system, which works excellently with a transfer rate of 100 Mbit/s, but would not be possible at all without the efficient EtherCAT protocol. This is because here, too, several kbytes of data have to be transferred with very short cycle times of 250 µs. Other communication systems cannot do this and require an elaborate decentralized control architecture for comparable systems.
Hans Beckhoff: And it is precisely our central control philosophy that makes it possible to calculate a mathematical-physical model of the entire process on one CPU. It essentially works in the same way as humans, whose central brain receives all data from the body via the central nervous system. The brain is modularly structured in terms of its subroutines, and effectively works out the desired movements or whatever action is required. Our automation technology is based on the same principle, and so EtherCAT corresponds to the central nervous system of a machine that allows as much peripheral data as possible to flow quickly into the central control model. The success of Beckhoff as an automation provider is largely due to the fact that we pursue precisely this approach – the “technological trifecta” of PC technology, EtherCAT, and central control philosophy.
Which topics are the focus of EtherCAT developments – both now and in the medium term?
Hans Beckhoff: As an Ethernet-based system, EtherCAT and the EtherCAT products will continue to follow the hardware layers available in the market. Even today, a wide range of Beckhoff-specific coupler designs is already available for RJ45, M8, and plastic- and fiber-optic cables, which will be expanded in the future to include other physical transmission types relevant to the market. Another major development step is the introduction of our hybrid technology for the one-cable solution. This is what prompted us to develop EtherCAT P, which integrates data and power into a 4-core standard Ethernet cable. Another particularly exciting development in this context is our series of EtherCAT P hybrid connectors in sizes B12, B17, B23, and B40, which will be included in an IEC standard as standard circular connectors for decentralized automation in future. We initially started EtherCAT as a communication protocol and use the complete hardware physics afforded by Ethernet. We also developed the electromechanical additions necessary for automation to make the system as practical as possible. In this context, EtherCAT P represents a huge step, as does the EtherCAT P connector series.
Martin Rostan: Another aspect that is becoming increasingly important in automation is the topic of cyber security. EtherCAT offers a number of advantages here, since its architecture and specific properties already provide everything inherently in the system to meet these challenges. Better still, EtherCAT can handle all of this without the need for a new protocol version, hardware changes, or special measures.
Global Success of EtherCAT
EtherCAT owes its worldwide success as an Industrial Ethernet system to two key factors: its first-rate, outstanding technology, and its disclosure within the framework of EtherCAT Technology Group. With regard to the high acceptance of EtherCAT among chip suppliers, device manufacturers, and users alike, the following ETG figures speak for themselves:
- More than 7,000 ETG members from 72 countries and still well over 400 new members coming on board each year
- Approximately 3,500 registered EtherCAT device manufacturers
- 12 EtherCAT chip suppliers with a total of over 40 different chips
- Over 230 control system suppliers with EtherCAT as system bus
- Over 200 motion control suppliers with more than 1,000 drive products