

ApplicationsMay 10, 2018
Data-centric architectures for oil & gas autonomous ROVs

Networking technology is enabling a new generation of data-centric architectures which were not possible before in oil and gas applications. As sensors and connectivity expand at the physical layer, new systems will be able to take advantage of new infrastructure solutions and complete the path to full autonomy.
Automation has become as significant to oil and gas as artificial intelligence (AI) has to the consumer market. Why has automation become the holy grail of oil and gas and what are the key factors driving it? Automation significantly reduces cost and enables companies to enhance their productivity, increase safety and security, while making their processes repeatable across all installations, and saves millions in integration costs.
In the upstream market segment, rig automation is becoming a reality, with most upstream companies building some type of an automation platform. The downstream market segment is proposing that outdated technologies be replaced with open, modern architectures. Subsea operators are starting to employ semi-autonomous Remote Operated Underwater Vehicles (ROVs) as part of their fleets. The one thing these new systems all have in common is that they are abandoning the traditional tightly coupled message-centric architectures in favor of highly decoupled data-centric architectures.
These systems were traditionally tightly coupled environments of processes, sensors and actuators. They were usually defined with control-centric view, which utilizes message passing to distribute state from one part of the system to another. The result was a highly coupled and weakly cohesive system, which results in systems that are not scalable nor easily extendible.
Data-centricity allows systems to be loosely coupled and strongly cohesive, which results in systems that are highly scalable, extensible, and easily maintainable.
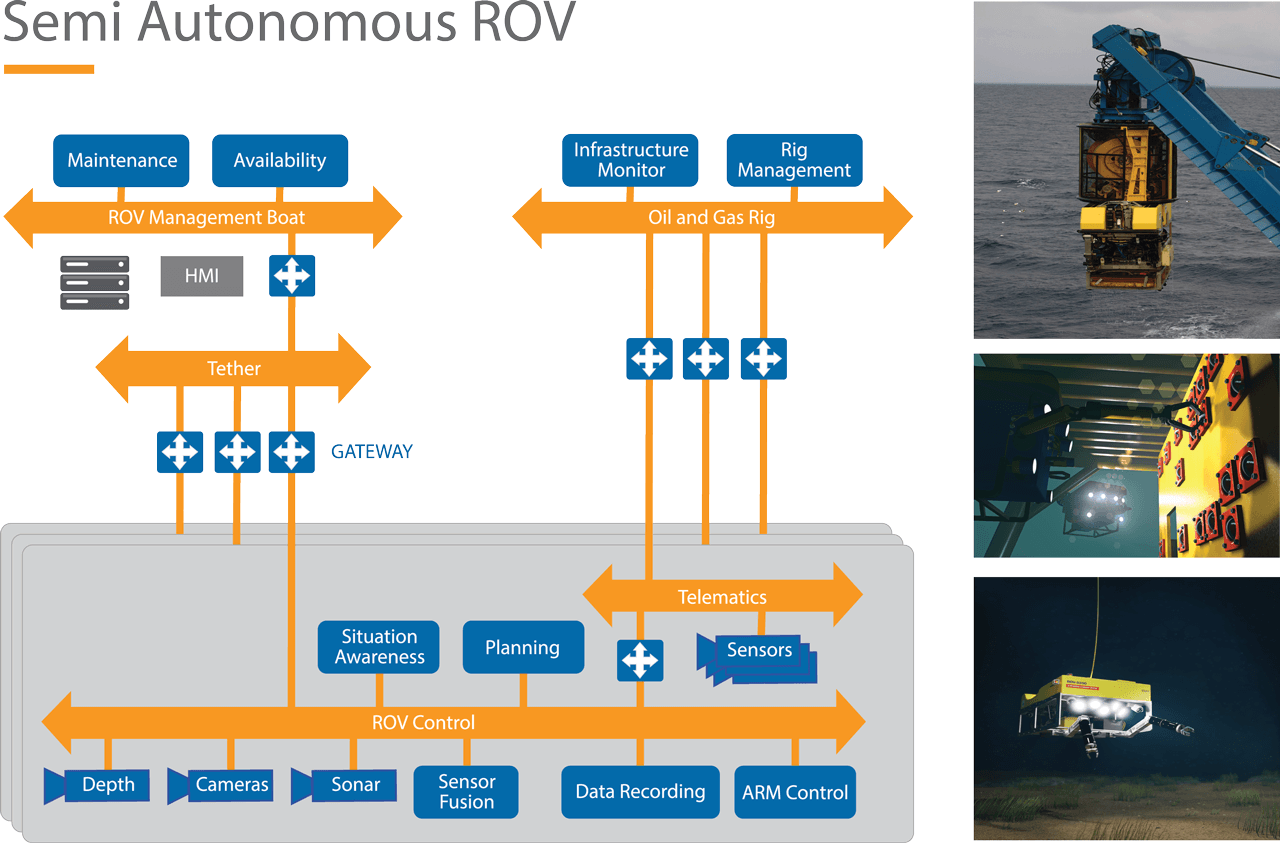
Architecture of a layered databus for semi-autonomous ROVs.
Shift towards data centricity
The growing need for automation and more autonomous systems is testing the limits of message-centric architectures and creating a need for a new paradigm of data-centric architectures. What makes a data-centric architecture different from the traditional message-centric architecture? Data-centricity says, “Hide the methods and expose the data!”
Data-centricity allows systems to be loosely coupled because components of a system care only about the data, not about other components or functions of the system. As a result, system components can achieve a higher degree of cohesion, enabling a system to evolve and scale effortlessly with the changing needs of its environment.
The Object Management Group (OMG) Data Distribution Service (DDS) defines a networking middleware which simplifies the complexities of network programming. Connext DDS, a product from Real Time Innovations (RTI) is a highly disruptive networking technology which enables a system to be fully decoupled in both space and time. RTI Connext DDS also provides highly configurable flow control to the connected pathways of the system.
Space: services can live anywhere and be moved transparently to the cloud, fog, or edge devices. The ability to live anywhere makes redundancy a function of the system.
Time: robust system operations allow for no dependency on startup sequence. Participants can come and go at will.
Flow control: provides all system components including:
- Automatic discovery of data
- Management of data rates
- Uncoupled reliability
- Ability to use any network or any transport
DDS allows a system to be expressed in terms of a data-model, which when implemented becomes a distributed database. This distributed database provides a common source of “truth” to every component of the system. Simply put, data-centricity says that system state is what components publish and subscribe. This is a key enabler for autonomous systems because autonomy requires that state be available so every component can make deterministic decisions.

A TechnipFMC Remotely Operated Vehicle (ROV) is deployed to provide subsea services.
Quality of Service attributes
To give each component of the system the ability to make deterministic decisions, DDS allows the system to configure the Quality of Service (QoS) of all DDS entities. QoS is a set of configurable policies which provide control over local and end-to-end properties of DDS entities. Local properties are used to control resource usage and end-to-end properties are used to control spatial and temporal qualities of the entities.
Autonomy benefits for oil and gas
TechnipFMC ROVs are used in deep sea environments at 3000 meters or more. They are used to monitor and service offshore oil and gas installations. Historically these ROVs were teleoperated, which required highly skilled pilots making decisions based on hundreds of data points being fed to them by the ROV through the tethering system. Thus, the movement of the robot was slow and deliberate.
Recently, TechnipFMC announced they were using RTI Connexts DDS to implement semi-autonomous behavior into a new generation of ROVs. With the introduction of the semi-autonomous functionality, a significant portion of the ROV movement can be automated, thus increasing the productivity of the task at hand.
Pilots can now take a role of oversight and assist the robot when human guidance is required. Semi-autonomous behavior can reduce traditional tasks from hours to minutes. Additionally, human error can be removed from ROV routine tasks.
Making ROVs semi-autonomous
What is required to redesign a conventional message-centric ROV in a data-centric paradigm and what does a data-centric DDS architecture look like? Utilizing the Industrial Internet Reference Architecture (IIRA) (“layered databus”), defined by the Industrial Internet Consortium’s (IIC), a system can be made up of multiple databuses layered by communication QoS and data model needs.
A databus can be implemented at the edge to integrate cameras, sonar, depth sensors and control of the ROV arm into the planning and situational awareness. Another databus can provide separation from the ROV control layer and the Tethering layer. This separation is important because the tethering data-model and QoS needs in this layer will have different needs. The databus for maintenance and availability can utilize another databus again with different QoS and data model needs.
To receive the full benefits of utilizing the “layered databus” architecture, a highly reliable and performance connectivity framework is needed. RTI Connext DDS provides both the strict reliable QoS as well as best effort QoS. Both QoS attributes can be used by a semi-autonomous ROV. Strict reliable QoS makes sure the data gets from publisher to subscriber in the sequence it was published. This means that DDS must check whether or not data was received and repair any data that was lost by resending a copy of the data as many times as it takes for the subscriber to receive the data, something which is typically suited for control messages to the remote operated vehicle.
If the system needs more performance and less reliability, best effort QoS can be used. The latest data is made available to the subscriber, and is heavily used by ROV operators for sensor data. A subscriber can also use time filtering capabilities of RTI Connext to inform the publisher that it is only interested in receiving data at a certain frequency. This enables subscribers the option to subscribe to a sensor’s data at a reduced rate. This ability allows the system to more efficiently utilize network bandwidth.
Another useful QoS policy for an ROV is that of liveliness, so the subscriber knows if a publisher is still available. If the ROV loses information from a sensor, the DDS subscriber will know instantly that the crucial information required for processing has been lost and the subscribing process can make the correct decision based on the liveliness change.
Durability is another useful QoS policy which allows a late joining subscriber to receive historical data from the sensors, giving the late joiner the ability to instantly see historical information. If a publisher goes away and persistent durability were configured, a late joining subscriber could still receive that publisher’s historical data.
Precise Time Protocol (PTP) with DDS can be used to do the periodic sync up. This combination of liveliness and durability QoS along with PTP usage helps make the system information more highly available and predictable. For large data like the video stream from the ROV camera, asynchronous publishing can be used.
It has built in flow control where the publishing rate or trigger event can be specified for the video data. This makes for an efficient network bandwidth utilization.
Next steps in autonomy
The next evolution in deep sea ROV technology is fully autonomous behavior which can be remotely observed. Full autonomy will save additional money on ROV operations, enabling these missions to be observed and tasked remotely from expensive vessels or offshore installations. However, the deep-sea connectivity technologies required to support these types of missions are still evolving.
At this time, autonomous deep sea ROVs can only be sent with a pre-defined mission and once they finish and resurface, information can be gathered and new missions can be programmed. It can reduce significant cost of deployment if the robots could be left at the subsea for a longer time and they are able to do multiple different updated missions assigned by the onshore control room.
Technologies such as Connexts DDS are enabling a new generation of data-centric architectures which were not possible before. As sensors and connectivity at the physical layer continue to evolve, these highly decentralized data-centric architectures will be able to take advantage of the infrastructure and complete the path to full autonomy.