

TechnologyJuly 27, 2019
EtherCAT G offers I/O response for high-performance machines
EtherCAT G uses 1 Gbit/s data transmission of standard Ethernet; while the EtherCAT G10 variant, presented as a proof-of-concept technology study, achieves data rates of up to 10 Gbit/s. The considerable increase in data rates compared with standard 100 Mbit/s EtherCAT significantly increases the possible data throughput.
EtherCAT reaches A NEW performance level with the EtherCAT G technology extension through its capability to superimpose itself on Gigabit Ethernet for data-intensive applications. Compatibility with the globally established standard EtherCAT, which uses 100 Mbit/s, and the same familiar ease of use are both guaranteed.
Efficient operation of parallel network segments is possible with the branch concept introduced for EtherCAT G.Using the branch concept, EtherCAT G (1 Gbit/s) enables a 2 to 7-fold increase in performance in relation to communication times and up to 10 times the bandwidth, depending on the application. 100 times the bandwidth is even possible with EtherCAT G10.
Fully compatible extension
With EtherCAT G, systems can leverage the high Ethernet data rates available today – without any changes to the EtherCAT protocol itself. The telegram sent by the EtherCAT master thus continues to pass through all network devices. Every EtherCAT slave reads the output data addressed to it on the fly and places its input data in the forwarded frame, but now with data rates of 1 to 10 Gbit/s. As before, the last device in a segment (or branch) will detect an unused port and send the telegram back to the master. The full-duplex property of the Ethernet physics is utilised for this capability.
All other EtherCAT properties are fully retained. Devices with three or four ports (junctions) make flexible topologies possible that can be adapted to machine architectures. Machine modules can be plugged in or out by Hot Connect as required. An internal network diagnostic function helps to minimise machine or plant downtimes and thus to increase availability with familiar efficiency. The integrated distributed clocks concept also remains available and enables synchronisation accuracies of better than 100 ns between devices. Conformity with the Ethernet standard IEEE 802.3 is also guaranteed.
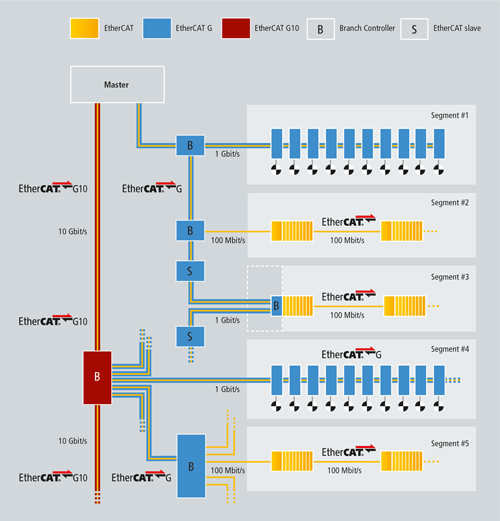
With the branch concept, mixed operation of EtherCAT, EtherCAT G and EtherCAT G10 is possible in one network.
Rollout of EtherCAT G
Performance and ease of use have been the hallmarks of EtherCAT communication. The same applies to EtherCAT G. Not only the protocol, but also the fundamental mechanisms and the configuration options remain the same. Only the function blocks necessary for physical access to the cables have been replaced by Gbit/s variants. The master therefore requires no new software, just one Gbit/s port – which usually exists in any case. The existing familiar cable types can also continue to be used: Cat.5e cables for EtherCAT G or Cat.6 cables for EtherCAT G10.
EtherCAT G slaves can be operated on an existing EtherCAT master, provided it has the Gbit/s port. Several special protocol extensions for EtherCAT G are currently being prepared that will allow for even higher-performance use. However, the extensions required for this on the master side will not be mandatory for the network to be operational.
Branch concept for mixed operation
EtherCAT and EtherCAT G can be operated within the same network, i.e. EtherCAT G slaves will work in a 100 Mbit/s EtherCAT network and vice versa. However, all EtherCAT G devices will switch back to the 100 Mbit/s mode in such a mixed network. In order to prevent this, the new branch concept makes EtherCAT branches possible, which enable the parallel operation of 100 Mbit/s segments in a 1 or 10 Gbit/s network through appropriate speed implementations. A branch of an EtherCAT G segment can be implemented on a 100 Mbit/s network using the new EK1400 EtherCAT G Coupler, allowing the extremely wide range of standard EtherCAT Terminals to be used within the EtherCAT G network environment. The 1 Gbit/s speed of EtherCAT G communication segment is retained.
The branch concept offers another crucial efficiency benefit: minimised propagation times. The CU14xx multi-port branch controllers are designed for this purpose and enable the interconnection of several EtherCAT and EtherCAT G segments. Individual branches are addressed with a single telegram from the master, which will then be processed simultaneously. This makes shorter signal propagation times possible and shorter communication and cycle times, because the telegram of a segment travels directly from the branch controller back to the master and not through all other connected segments as well.
Disclosure and availability
In the coming months, the FB1400 EtherCAT G piggyback controller board will be available for the EL9820 EtherCAT evaluation kit. The FB1400 will have an FPGA with a fixed configuration as an EtherCAT G slave controller (ESC). If necessary, customers can then also create and use their own ESC configurations with the planned IP core for EtherCAT G.
his will give EtherCAT users as well as master and slave manufacturers ample opportunity to evaluate the new technology. Availability of the EK1400 EtherCAT G Bus Coupler is scheduled for the second half of 2019. It will offer branch controller functionality and enables direct connection of all EtherCAT Terminals as well as all other EtherCAT products in EtherCAT G networks. Further products will follow, such as 3-port and 8-port branch controllers, an EtherCAT G junction, an EtherCAT G10 branch controller and an EtherCAT G10 piggyback controller board.
A disclosure and introduction of the EtherCAT G/G10 protocol by the EtherCAT Technology Group (ETG) is planned for this autumn. As with EtherCAT more than 15 years ago, all ETG member companies will be able to use the extension and benefit from it.
Applications & performance
For most present-day applications the high performance of standard EtherCAT is fully adequate. Accordingly, EtherCAT G communication was developed with extremely large-scale applications and many devices in mind as well as the increasing use of particularly data-intensive devices such as vision cameras, complex motion systems or measurement applications with high sampling rates. Machine vision, condition monitoring or the innovative transport systems XTS and XPlanar require transmission of several hundred bytes of process data per cycle for each device. In conjunction with short cycle times of less than a millisecond, the high transmission bandwidths provided by EtherCAT G are called for in this context.
The first practical EtherCAT G application is the XPlanar transport system. This planar motor system enables motion control and highly precise positioning of passive free-floating movers with six degrees of freedom. Due to the continuous position feedback required for the unique new system, extremely large data quantities are produced that have to be transmitted within a few microseconds. This would hardly be possible without the high performance of EtherCAT G.
These two sample calculations illustrate the boost in performance or the savings in data transmission time that can be achieved with EtherCAT G and the branch concept.
Accelerating communication times: 128 servo axes in 34 µs
- A machine network with 128 servo axes was selected as the initial application.
- A “standard data width” of 8 bytes in and out per device results in a total of 1024 bytes in and out per cycle. With classic EtherCAT devices, taking into account hardware propagation delay times and telegram lengths, a communication time of 237 µs will result.
If standard EtherCAT devices are now replaced by EtherCAT G devices, the communication time can be reduced to 150 µs just on account of the shortened frame length due to the higher data rate. If the branch concept is used and the complete network is divided into eight EtherCAT G segments with 16 servo drives each, a communication time of only 34 µs can be achieved – i.e. communication is now 7 times faster.
Using the bandwidth advantage: scanning 200 analog inputs with 100 ksamples/s
- An measurement Condition Monitoring application where a 10 km-long conveyor belt is monitored.
- Application consists of 200 analog channels (±10 V) with 100,000 samples/s (10 µs measurement interval) per channel, which have to be scanned with a cycle time of 1 ms.
The present-day solution consists of four independent 100 Mbit/s EtherCAT networks, each with 26 two-channel analog input terminals with oversampling function (EL3702). Eight telegrams with 1313 bytes each are required in every EtherCAT network, resulting in a required bandwidth of 322 Mbit/s. Thus, each of the four networks utilises 88% of the available bandwidth.
If the four EtherCAT networks are now replaced by an EtherCAT G network and the EK1100 Bus Couplers by EK1400 EtherCAT G Bus Couplers (branch controllers), it is possible to continue to use existing standard EtherCAT Terminals. With the same cycle time (1 ms), bandwidth utilisation of only 350 Mbit/s results in just one EtherCAT G network. The remaining bandwidth of 650 Mbit/s enables an extension of the channels and the support of even higher analog sampling rates.